

Description
HSD6 series synchronous AC servo driver adopt advanced control algorithm, support mainstream protocol such as MODBUS, CANOPEN, EtherCAT, Encoder resolution up to 23bits. response up to 3.0KH.
Overview:
HSD6 series synchronous AC servo driver adopt advanced control algorithm, support mainstream protocol such as MODBUS, CANOPEN, EtherCAT, Encoder resolution up to 23bits. response up to 3.0KH.
Encoder resolution can up to 24bits, support 17bit increamental and 17bit/23bit/24bt absolute type encoder.
STO &Full colse loop function is optional.
Speed loop response frequency up to 3.1KHz.
Adjustment-free function, Self-tuning function.
Friction&backlash compensation function.
This servo driver has mature servo technology and the highest cost performance.
Features:
1. Adjustment-free function
2. Speed response is greatly improved
3. Support multiple encoder types
4. Dynamic braking function
5. Vibration suppression function
6. Support multiple communication interfaces to realize high-speed and high-precision control
Parameters:
| Item | Specifications | ||||||||||||||
| HSD6-DS | 02 | 03 | 06 | 08 | 12 | 15 | 18 | 25 | 32 | 45 | 60 | 75 | |||
| outlook | A(mm) | 32 | 53 | 88 | 130 | 190 | |||||||||
| B(mm) | 152 | 152 | 248 | 352 | 447 | ||||||||||
| W(mm) | 148 | 186 | 215 | 215 | 215 | ||||||||||
| H(mm) | 160 | 160 | 258 | 358 | 463 | ||||||||||
D(mm)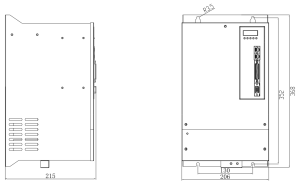 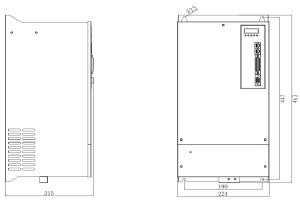 |
42 | 56 | 65 | 110 | 206 | 224 | |||||||||
| R(mm) | 2.5 | 2.5 | 2.8 | 3.5 | 3.5 | ||||||||||
| Weight(kg) | 0.8 | 1.0 | 1.5 | 5.1 | 8.3 | 12 | |||||||||
| Input Power | Single phase/ three phase AC200V-240V,
-15%~10%,50/60Hz |
Three phase AC200V-240V,-15%~10%,50/60Hz | |||||||||||||
| HSD6-DS | 04 | 06 | 09 | 12 | 17 | 21 | 26 | 32 | 37 | 45 | 60 | 75 | |||
| outlook | A(mm) | 49 | 70 | 88 | 130 | 190 | |||||||||
| B(mm) | 162 | 193 | 248 | 352 | 447 | ||||||||||
| W(mm) | 177 | 204 | 215 | 215 | 215 | ||||||||||
| H(mm) | 174 | 203 | 258 | 368 | 463 | ||||||||||
| D(mm) | 60 | 92 | 110 | 206 | 224 | ||||||||||
| R(mm) | 2.5 | 2.8 | 2.8 | 3.5 | 3.5 | ||||||||||
| Weight(kg) | 1.3 | 2.7 | 5.1 | 8.3 | 12 | ||||||||||
| Input Power | Three phase AC380V-440V, -15%~ 10%,50/ 60Hz | ||||||||||||||
| Basic information | Environment | Temp℃ | Use environment
temperature |
0~+55℃ (decrease if the ambient temperature is between 40℃ and 50℃ ) | |||||||||||
| Storage environment temperature | -20 ~ 65℃ | ||||||||||||||
| Humidity | Use environment
humidity |
20~85% RH below(No condensation) | |||||||||||||
| Storage environment humidity | 20~85% RH below(No condensation) | ||||||||||||||
| Use and preserve ambient air | indoor(no sunshine)、No corrosive gas, flammable gas, oil mist, dust | ||||||||||||||
| altitude | Below 1000m | ||||||||||||||
| vibration | 5.8m/s2(0.6G)below 10~60Hz(Can not be used continuously at resonance frequency) | ||||||||||||||
| Insulation withstand voltage | Basic-FG between AC1500V 1min | ||||||||||||||
| Control way | Three-phase PWM converter sine wave drive | ||||||||||||||
| Encoder feedback | 1. 2500ppr incremental type (saving line/non-saving line)
2. 17/23bit type (after adding a battery, it can be used as a multi-turn absolute) |
||||||||||||||
| Control
signal |
Input | 9 inputs (DC24V optocoupler isolation) switch according to the control mode function | |||||||||||||
| Output | 5 output (DC24V optocoupler isolation, open collector output) switch according to the control mode function | ||||||||||||||
| Pulse signal | Input | 2 inputs (optocoupler isolation, RS-422 differential, open collector output) | |||||||||||||
| Output | 4 outputs (A/B/Z phase RS-422 differential; Z phase open collector output) | ||||||||||||||
| Comm.
function |
RS232 | For PC communication (for “Servo studio” connection) | |||||||||||||
| RS-485 | For upper remote control communication (1:n) | ||||||||||||||
| CAN | CANOPEN bus communication | ||||||||||||||
| Regeneration function | Optional regenerative resistor, external regenerative resistor. Pay attention to modify internal parameters | ||||||||||||||
| Control model | 6 control modes: speed control, position control, torque control, torque/speed control, speed/position control, torque/position, torque/speed/position hybrid control | ||||||||||||||
| Function | Control input | Alarm reset, proportional action switching, zero fixed function enable, forward drive prohibited, reverse drive prohibited, external torque limit for forward rotation, external torque limit for reverse rotation, forward jog, reverse jog, forward Reset switch, reverse reset switch, origin switch, emergency stop, servo enable, gain switch | |||||||||||||
| Control output | Servo ready, motor rotating, zero speed signal, speed reached, position reached, positioning approach signal, torque limit, speed limit, brake output, warning, servo failure, alarm code (3-digit output) | ||||||||||||||
| Position control | Pulse input | Maximum
command pulse frequency |
Differential input: high-speed maximum 4Mpps, pulse width cannot be less than 0.125μs
The maximum low speed is 500Kpps, and the pulse width cannot be less than 1μs Open collector: maximum 200Kpps, pulse width cannot be less than 2.5μs |
||||||||||||
| Input pulse signal form | Differential input; open collector | ||||||||||||||
| Input pulse signal method | Pulse + direction, right angle phase difference (A phase + B phase), CW + CCW pulse | ||||||||||||||
| Command
pulse division/ multiplication (Electronic gear ratio setting) |
0.1048576 < B/A <419430.4 | ||||||||||||||
| Command filter | Smoothing filter, FIR filter | ||||||||||||||
| Pulse output | Output pulse form | Phase A, Phase B: Differential output
Z phase: differential output or open collector output |
|||||||||||||
| Frequency division ratio | Arbitrary frequency division | ||||||||||||||
| Output pulse function | Encoder position pulse and position pulse command (can be set) | ||||||||||||||
| Speed control | Control input | Servo ON, alarm reset, speed command reverse, zero speed clamp, internal command selection input 1,
internal command selection input 2, internal command selection input 3, internal command selection input 4, forward rotation external torque limit input, reverse rotation External torque limit input, emergency stop |
|||||||||||||
| Control output | Alarm status, servo preparation, brake release, torque limit output, speed limit output speed reached, speed consistent, motor rotation output, zero-speed signal output | ||||||||||||||
| Torque Control | Control input | Servo ON, alarm reset, torque command reverse, zero speed clamp | |||||||||||||
| Control output | Alarm status, servo preparation, brake release, torque limit, speed limit output, emergency stop | ||||||||||||||
| Torque command input | (Factory default setting, the range can be set by function code) | ||||||||||||||
| Speed limit function | Positive and negative internal speed limit P03.27, P03.28 | ||||||||||||||
| Common | Speed observer function | YES | |||||||||||||
| Damping control function | YES | ||||||||||||||
| Adaptive notch filter | YES | ||||||||||||||
| Automatic adjustment function | YES | ||||||||||||||
| Encoder output
frequency division |
YES | ||||||||||||||
| Internal location planning function | YES | ||||||||||||||
| Adjustment/
function setting |
Use the host computer setting software “Servo studio” to adjust | ||||||||||||||
| Protection | Over voltage, abnormal power supply, over current, overload, abnormal encoder, over speed, excessive position deviation, abnormal parameters, etc. | ||||||||||||||
For more detailed parameters, please download the sample.
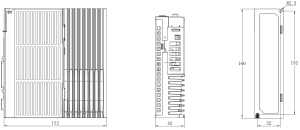
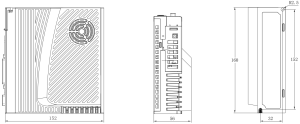
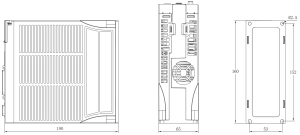
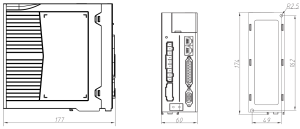
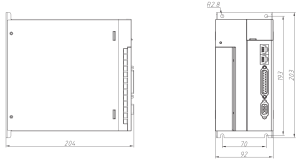
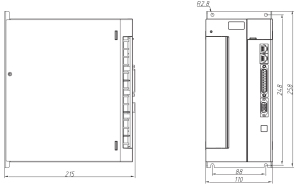
Dimension:
HSD6-DS-02A00/HSD6-DS-03A00
HSD6-DS-06A00
HSD6-DS-08A00/HSD6-DS-12A00/HSD6-DS-15A00/HSD6-DS-18A00
HSD6-DS-04D00/HSD6-DS-06D00
HSD6-DS-09D00/HSD6-DS-12D00/HSD6-DS-17D00
HSD6-DS-25A00/HSD6-DS-32A00/HSD6-DS-21D00/HSD6-DS-26D00/HSD6-DS-32D00
HSD6-DS-45A00/HSD6-DS-37D00/HSD6-DS-45D00
HSD6-DS-60A00/HSD6-DS-75A00/HSD6-DS-60D00/HSD6-DS-75D00
Download:
| Series | Model | Download |
| Servo Drive | HSD6 Series High Performance Servo System Catalog V2.1 | |
| Servo Drive | HSD6 Series Servo Drive User Manual Version-V2.2 | |
| Servo Drive | HSD6 Commissioning Software_V1.0 |




